硕士论文
BTT导弹的飞行控制法的设计和仿真研究
名称:****学位申请级:主
专业:系统工程
讲师:**林
概括
旨在通过使用倾斜转动(BGOUK-T0.N组,称为BTT)控制技术拦截目标的导弹
在此过程中,滚动通道命令可以控制导弹的最大升力表面以快速转移到理想的操作
空气动力学的效率得到了极大的提高,并且无误的速度显着提高,从而缩短了战斗时间并增加了正常方向。
运营空间已扩大。除了其在移动性方面的优势外,使用BT控制技术的策略
该导弹具有稳定性,抗压比的特性以及与先进的 Air Inlet设计要求等的兼容性。
与当前的侧滑动转弯(集,称为集合)导弹相比,表面也得到了显着改善,因为
一段时间以来,关于BTS导弹的研究已成为国内外的流行研究主题。
根据实际的工程要求,本文将导弹作为研究对象,并基于其运动学和动态特征,即
建立了导弹的数学模型,并分析了每个通道之间的耦合效果。在此基础上,分别使用经典控制。
BTT导弹自动驾驶仪的设计,在决赛中进行了六次
完整的弹道模拟自由度,以验证设计的自动驾驶仪的有效性。它主要包括以下内容。
首先,基于基于小型干扰线性方法线性化的导弹模型,忽略了通道之间的耦合。
使用经典控制理论分别设计每个通道。引入协调和脱钩以抑制三个通道之间的耦合
设计的自动驾驶仪基本上实现了BTT控制。其次,也基于小型干扰线性化
线性化后的导弹模型将其状态空间方程式写出,并且通道之间的耦合被认为是干扰。
使用强大的状态反馈控制设计每个频道控制器,并且设计的自动驾驶仪符合某些控件
和稳健的性能。最后,基于简化的模型验证上述两种自动驾驶仪
导弹可以根据设计目标稳定而准确地飞行,并进一步执行完整的弹道6DOF数学
基于这两种控制方法设计的BTS导弹自动驾驶仪性能的模拟和比较。
仿真结果表明,基于经典控制理论和强大的状态反馈控制理论设计的BTS
导弹自动驾驶仪具有良好的控制效果,但是基于强大的播放状态反馈控制理论而设计的
自动驾驶可以更好地控制和强大的性能。本文的研究是BTS导弹的工程项目
用于提供参考。
关键字:BTS导弹自动驾驶仪;经典控制:强大的明矾状态反馈控制
抽象的
wHen名子子子
Desi Seal EDB邪恶
在
btt
con 0l
血吼
电影院的版的版
最大
SSIL
tllm
机动方向,c“ ling
nle sha绳
促进
TLLE
迪亚利奇
E-Temi Cie LCY,Temi 大坝
on on on on on on on on on on on on on
CPI
格雷。 b
T11E
优势
在
编织tlle
陆上
Desj Ed
B Edon Btt Con
优势
在
稳定咆哮拖拉
比率鲤鱼【dtlle
兼容)
设计血G
OFADV HOE CALED ET。心A。
RESUK研究
ve心号e
在
hgae
recenⅱy。
in吐lis‰sis,bas bas
不需要练习,我
MA:主题
inod inod lofmissil isbuilt
ig
它的Chara
Dynar Ilics
和
l(如果i
COUPL MA EF CTS
赌注,ⅳ
国王扎了。 a她
颅面
控制也EO和
强壮的
h统计
反馈。 OL
t:heo心
T0
设计血G
btt
导弹。 f,si】【-
Ofomo(6DOF)侧ect0
ri eri tlle
可用
Ttle
设计
n'
自动驾驶。 m【内容
包括以下内容。
在
首先,基于
线性化
由Hoe 评估
线性化
tecllilique,
是
应用
到
设计
这
】
一个人,看着
这
耦合
C round虫。 the the the the the theiratinies
脱钩
con 0l
Syst Hoe
耦合
elocss.
结果
建议
马特斯
Desi打印
自动驾驶
BTS CON 01。
fumle Plus矿石,基于
在 TEAR的LET模式上
经过
小的
扰动
线性化
tecllilique,
统计
空间方程
是
witt饿。有效
T11E
耦合
e ctsb舔ⅳ
chaie the the the the the the .irly.irly.ifryat
反馈
控制理论
是
应用
到
Desi Print 11e
控制
Ech Hoe 。这些结果
建议
1
有
PE缺陷CT
康德
perfb atatatatatatatatatatatatatatatatatatatata
将AiLCE添加到PE表面。
iii
f以上
订单0
V-FACE F3R也在
NL
自动设计
基于0
模型
cai
导弹
aild
accllra = tely,6dof t ah
修整
是
,Hoe D恤和Hoe
奥
基于
0n
这些
是
完全的
反映。
这些结果
建议
导弹
自动载体
设计
Conndl
Tlleo Trick Day。 sta £ e
反馈
)r有病人。 ect
骗子
perfo病变。 h0
设计Byrobⅳ。 SS
反馈
con 0l
Meo H很高兴能变得完美。 t血液
提供
参考
我
耐引擎打印贴片
Ofbtt导弹。
key
wo:bttmissil
自动驾驶;颅面
c; bust
h sat
f返回
控制
iii
第1章简介
第1章简介
1.1该主题的背景以及研究的目的和意义
1.1.1项目背景
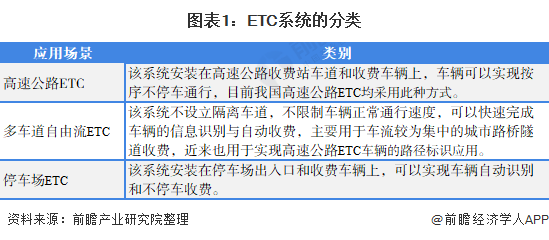
越来越恶化的现代战场环境将提出技术指标,例如战斗领空,机动性和导弹的空气动力效率。
提出更高的要求。目前,世界上大多数导弹使用Ste ,它使用此控制技术
用于操作的导弹称为Ste导弹。 (((((((((((((((((((),((((((((),()))))
它可以使导弹相对稳定在导弹主体的纵轴中,并控制导弹以在螺距和偏航平面中产生相应的正常方向。
力量(其联合力)指向指导法要求的方向,即导弹在侧面滑动中横向移动。攻击角度
高导弹武器指导准确性的重要手段,但是STS导弹控制技术仅适用于在小攻击中具有轴对称布局的导弹。
在角落下使用。当攻击角度大于25时。在导弹俯仰,偏航和滚动的三个通道中,将有严重的空气动力跨界。
耦合,这给导弹控制系统的设计带来了极大的复杂性。另外,随着攻击角的增加,将发生指导
不利的因素,例如炸弹杀死概率的降低以及头部天线角度的增加。
大量攻击角度的严重空气动力交叉耦合是由不对称随机涡流的产生引起的。大量风洞测试桌
明格:当导弹对称而无需侧滑时,在大攻击角下产生的空气动力学交叉耦合并不大。这将推动
倾斜转弯(BTS)控制技术的开发和开发,可将导弹侧滑动而无需侧滑侧滑动来改善
高导弹可操作性和指导准确性。
1.1.2研究的目的和意义
由于B1VR导弹在拦截目标时需要迅速绕速度向量滚动,因此该导弹的俯仰将由目标横向限制,因此该导弹将通过直径摇摆的通道倾斜。
有很强的耦合,因此自动驾驶仪的传统三通道独立设计方法失去了理性。加入我
我们希望设计的自动驾驶仪能够克服外部干扰的影响,例如大气干扰和传感器噪声,尤其是为了克服传播
在设计仪器的设计中,必须根据导弹的飞行状态的变化多次进行飞行员增益,即需要按下要求。
在固定领空中设计的特征点设计的飞行员可以控制飞空中多个轨迹的导弹的完整弹道稳定性。
确定和准确地飞行。因此,为BTS导弹自动驾驶设计找到了多变量的鲁棒控制方法。
它已成为我们面前的重要问题。
bttt00000000000000000000000000000000000000
国内外的流行研究主题。美国,英国,法国和其他国家已经研究了B-技术,其中包括美国五个
自1900年代将该技术应用于“ ”导弹以来,这项新技术就已经开发出来。特别是七十
第1章简介
在中期,由于现代控制理论的发展,过滤理论和计算机技术以及BTT导弹控制系统
已经做出了一些硬件突破,美国空军和海军已经提出了开发高性能导弹的计划,例如先进的导弹。
(HAF Sword)先进的中距离空对空中导弹采用了BTT控制技术,到目前为止,已经形成了BTT导弹。
热热[11]。一些美国军事研究机构,学院和武器系统的全日制设计组正在尽力使用BTS。
技术可以改变旧产品,执行数字模拟和半物理模拟,最重要的研究结果保密,但在公共出版物中
有一些报道。从美国宇航局的一些学术会议中,我们可以看到,在美国,BTT导弹已进入
已经研究了以下方面
手术导弹,非线性控制和BTS导弹自动驾驶仪的最佳指导规则的计算机辅助设计
面条。外国对以下四种导弹进行了对BTS技术的申请研究:中型和远程空对空气拦截导弹,
远程对空中拦截导弹,空地向下导弹和可操纵的重新进入车辆[21]。在我们国家,尽管这项技术始于
已经很晚了,但也得到了充分的重视并取得了一定的进步。因此,进一步对导弹BTS的深入研究
控制技术及其工程应用具有重要意义。
1.2
bttt控制技术特征和困难
与Ste导弹相比,BTS导弹具有以下明显的优势[3]:
(1)导弹的提升比例得到了改善,导弹的可操作性得到了极大的提高。在拦截目标的过程中,BTS导弹
滚动命令迅速将导弹的最大升力表面转移到理想的机动方向,并在一个平面中生成导弹。
大型升降机不增加升力并在其正交平面中拖动,从而大大提高了空气动力学效率。
速度显着提高,缩短战斗时间,增加正常超负荷并扩大战斗空间。
(2)提高导弹的空气动力学稳定性。当BTS导弹在最大升降机内操纵时,侧面滑动角为零或
大约为零,导弹的稳定性最佳。侧面滑动角产生的诱导扭矩为零,因此导弹的最大值
攻击角的局限性可以进一步放松。
(3)BTS导弹与发动机的摄入管设计具有良好的兼容性,并且可以获得令人满意的 Air
发动机性能。拉式发动机的正常操作要求导弹只能具有很小的侧面滑动角。用于STS导弹
它很难实现,但是对于BTS导弹来说很容易实现。
(4)与S1T导弹相比,在相同的范围条件下,BTS导弹更轻。
(5)它有利于开发新的导弹空气动力学布局。为了充分利用导弹的高机动性,可以允许导弹成为
气动布局采用扁平,三角形或椭圆形横截面以及面对对称性等形状。
(6)采用两轴控制,允许两个控制渠道替换上一个STI的三个控制渠道,BTS控制技术
导弹方向弹头的使用大大降低了导弹定向弹头的设计复杂性。
第1章简介
如果BT 想要替换当前的STI控制技术,则它将成为可行且可行的控制解决方案。
以下关键设计问题需要解决p]:
(1)BTS导弹是一个具有运动耦合,惯性耦合,气动耦合和控制耦合的多元系统
为了选择适当的控制方法来解决通道之间的耦合问题。
(2)BTS控制技术要求侧面滑动角非常小,大约为零。这种情况不能自然地满足,需要设计
动态飞行员协调控制系统用于确保偏航通道和滚动通道的协调操作,以实现零侧滑动角
要求。
(3)对于BTS导弹在大型空域中飞行,希望根据某个特征点设计的自动驾驶仪可以控制导弹。
STS导弹使用的三通道控制系统的独立设计不再适用。
因此,对导弹控制系统的强大设计方法的研究更为重要。
(4)当BTS导弹在空中飞行时,对象参数在大范围内急剧变化,这需要自动驾驶仪具有强大的适应性。
为了确保在整个飞行中,导弹始终具有良好的静态质量和动态特性。
(5)B1VR导弹的性能良好,需要足够大的滚动角速度,以确保较大的滚动角速度用于无线电
自动波引导的控制环的稳定性具有不利影响。因此,有必要考虑抑制和减少滚动耦合
合作对导弹指导电路稳定性的影响。
1.3基于BTS控制技术的自动驾驶研究概述
鉴于BTS导弹的特征和现有问题,国内和外国学者提出了许多设计方法,主要包括
。
以下方面。
1.3.1基于经典控制理论的设计方法
在1930年代和50年代,经典控制经理出现了,以适应单变量调整和后续系统的设计需求。
争论。经典控制理论的设计方法适用于单变量系统(SISO)或弱相关的多元系统的设计。
在经典的SISO自动驾驶设计方法中。 1972年,Emmen [4]等。基于经典控制理论
在BTS导弹的设计中,交叉耦合被认为是未知的干扰,并且俯仰和偏航路径自动驾驶仪独立引入螺距和偏航路径自动驾驶仪。
自适应抗干扰设计,由于其良好的抗干扰能力,使用各种耦合功能来衡量系统性能指标
该影响的影响可能仅限于允许范围。 1982年,当设计BTS导弹自动驾驶仪时,它提出了
非耦合的单环设计方法,该方法首先忽略了系统中存在的交叉耦合,并分别设计每个通道。
然后将协调分支添加到系统中,以使通道之间的人工耦合消除导弹运动对偏航通道的影响
戒指。该方法对于小滚动角速度有效,但是当量规较大时,设计结果并不理想。 1987
3
第1章简介
2019年, [6]等。设计的BTS导弹自动驾驶仪首先忽略了三个通道之间的耦合,然后使用了频域。
方法和根轨迹方法独立设计三通道自动驾驶仪,需要俯仰和滚动频道的性能以满足设计要求
发现YAW通道响应速度至少与滚动通道一样快,并且指导系统仅产生螺距加速度和滚动角。
偏航通道起着协调的作用,因此设计的侧面滑动角很小,实现了BTT控制。
但是,上述控制系统的设计需要增加每个通道的稳定余量,以克服耦合的影响,并
只有当耦合被视为在非常小的滚动速率条件下的随机干扰时,对每个通道的独立研究都有一定的应用。
价值。因此,对于具有较高滚动速度和强耦合效果的BTS导弹,设计控制器时无法耦合。
一起,这被认为是未知的干扰。还需要寻求强大攻击BTS导弹的强耦合问题以实现脱钩控制。
方法。
1.3.2基于现代控制理论的设计方法
在1950年代后期,由于航空航天的需求和复杂的工业控制问题,提出了多变量系统。
(MIMO)设计问题。 BTS导弹控制技术在1980年代的研究结果基本上基于小米
动态速率,弱耦合BTS对照。实际上,BTS导弹控制系统是一个多元控制系统,
这可以将BTS导弹的俯仰通道用作耦合频道,并使用基于现代控制理论的多元设计
研究了导弹的方法控制。
(1)最佳控制方法
在1960年代初,由于数字计算机的应用快速开发以及动态系统的优化设计理论,
基于过滤的想法,最佳线性次级调节器LQR和Kaman过滤器出现为介质
线性二次高斯LQG多元反馈控制系统的最佳设计方法[3J]。 lt设计理论针对整体
由状态反馈LOR方法设计的控制系统具有良好的稳定性和性能,但基于过滤器。
LQG设计的问题很差。为了使线性二次高斯LQG设计足够
稳定性,1979年,Doyle和Ste'7提议将虚拟过程噪声作为设计参数以建模输入。
末尾的强大恢复方法是线性二次高斯/环函数恢复(LQG/LTR)方法。 1987 Wili Hos【8】
等。采用线性二次理论来设计BTS导弹的音调/偏航通道自动驾驶仪,在每个特征点,
使用“系数冻结方法”,即滚动角速度是恒定的,将非线性模型线性化并获得两个线性
子系统,一个是一个独立的滚动通道子系统,另一个是由俯仰和Yaw通道组成的MIMO模块
然后,使用LQG/LTR方法设计了俯仰模型。这有一个滚动的角速
这种自动驾驶仪的自动驾驶仪具有良好的转弯协调性。但是,在大攻击中
在条件下,模拟结果表明偏航轴往往会不稳定。在该国,冯·温吉安(Feng )[9]设计了传统的时域
4
第1章简介
根据该方法,研究了频域指示描述及其在约束下的加权阵列选择方法,并建立了集成
受控的LQR(线性二次调节器)控制模型。此方法需要求解全级线性转换力矩
数组的计算工作量很大,很难实时控制。 Cui 等。 [101]研究了线性二次类型的最佳控制系统
加权阵列与频域指数之间的相应关系是根据循环形成理论给出的,并给出了加权阵列选择方法。
它用于BTR导弹的自动驾驶设计。基于建立静态差异控制模型,
设计结果,以实现足够预定的频域指标。提供了设计强大的BTS导弹控制系统的有效方法
方法。
但是,由于LQG设计的受控对象不考虑模型不确定性,而外部干扰仅是固定的干扰
电源频谱密度信号,因此对于实际控制系统设计,LQG方法设计的控制系统很强
性别很差。它甚至可能导致控制系统的不稳定。因此,具有次级性能指标的最佳控制系统的鲁棒性
该问题是设计实际受控对象时必须解决的问题。 b 【11】在文献中指出:最佳控制
系统的高性能与鲁棒性之间存在两个矛盾。可以适当地降低控制系统性能指标的要求。
改善控制系统的鲁棒性。
(2)模型跟踪控制方法
模型跟踪控制是现代控制理论中的另一种重要方法。所谓的模型跟踪控制是指力
受控对象跟踪具有理想动态特征和稳态质量的参考模型,以获得所需的闭环系统性能。当然
BTS导弹参数的不确定性的变化使完整的模型跟踪是模型跟踪控制系统所需的。
条件很难满足,这将直接影响导弹的控制准确性并降低快速响应。 Zhou Zhe 12]是一个完整的模型,
在跟踪条件失败的情况下,提出了本地模型跟踪的理论和概念,该理论的重点是研究
BTS导弹俯仰或YAW通道的多变量局部模型跟踪控制系统构建了复合参考模型的结构。
对于恒定的线性多变量系统,此方法无疑是正确且有效的,但是该方法用于时变线性多变量系统。
测量BTS导弹目标将有很大的困难。首先,我们需要在不同时间找到特征点的全级线性转换
矩阵具有较大的工作负载:其次,在确定参考模型的输入时,它还涉及PEI POL的广义逆基质。
计算。 Zhang Youan [L3]旨在基于导弹动力学部的时变线性多变量B1VR导弹跟踪控制系统
提出了该数字的名义值,设计了一种设计参考模型的新方法,非线性BTR导弹自动驾驶仪适用于
它适用于控制足球飞行的导弹。
使用现代控制方法设计BTS导弹控制系统需要对受控对象进行准确的状态描述,并且
它通常基于两个基于小扰动理论和固定参数的基本假设。小型干扰理论是指导弹的非线性运动
该方程采用增量线性化方法,而固定参数则假定导弹动力学方程中的系数不变。
第1章简介
这两个假设的前提忽略了导弹的固有非线性运动特征。因此,有必要同时解决模型中错综复杂的问题。
强大控制动态参数的问题是寻求非线性控制。高性能BTS导弹自动驾驶的方法
飞行员设计的出路。
1.3.3基于非线性控制理论的设计方法
随着现代战争中导弹控制系统要求的增加,导弹自动驾驶设计越来越必要
考虑系统的非线性。随着非线性理论的持续发展,一些非线性控制方法也逐渐引入FEI。
步行者的自动驾驶设计取得了一些突破。这是BT控制场中的一些非线性
性设计方法。